Optics for Automotive Lidar: Metasurface beam steering enables solid-state, high-performance lidar
Lidar is considered the primary sensor for self-driving cars, acting as the ideal complement to cameras and radar. Beam steering is often the defining component of a lidar system, determining performance, size, and reliability. First-generation lidar systems use rotating assemblies of lasers, optics, and detectors, while second-generation lidar systems are beginning to use MEMS-based mirrors—each approach has substantial limitations.
The ideal beam-steering component of a lidar system has challenging and, at times, contradictory requirements. The two most-critical requirements are the optical aperture size and the scanning field of view. A large optical aperture is critical to the performance of the lidar system for two reasons. On receive, the aperture size determines the light-gathering capability of the system and thus drives the range, resolution, and frame rate. On transmit, a large aperture enables a larger-diameter laser beam in the near field of the system so that more laser power can be transmitted without exceeding the eye-safe power density.
Automotive lidar presents a unique challenge because these large-etendue systems require a large product of aperture size and field of view. In mechanical-scanning systems, the aperture size and field of view are often coupled: as aperture size increases, the field of view decreases in resonant scanning systems such as MEMS mirrors and galvanic mirrors.
In addition to large aperture size and field of view, it is highly desirable to have a beam-steering component that is truly solid-state and semiconductor-based. In combination with low-cost semiconductor lasers and detectors, the use of a solid-state beam-steering device can endow lidar systems with high reliability, low cost, and high manufacturability. Optical phased arrays implemented with silicon photonics represent one of the few existing solid-state beam steering technologies, but this approach exhibits limited aperture size and optical efficiency.1 Other approaches include liquid-crystal waveguides2 and traditional liquid-crystal-on-silicon (LCOS) spatial light modulators,3 which have limited switching speed and field of view.
Metasurfaces
Metasurfaces are a new class of optical devices based on two-dimensional arrays of subwavelength optical elements, which show promise in applications such as flat optics and optical beam steering.4 The metasurface elements act as subwavelength phase or amplitude modulators, which can be static or dynamic. Arrays of these elements act in transmission or reflection to encode arbitrary optical functionality such as focusing, steering, and other kinds of wavefront manipulation. Part of the promise of these devices lies in their ability to perform these complex optical functions using metasurfaces that are manufactured using standard lithographic techniques common in the semiconductor industry. For example, a lens can be created by spatially varying the width of dielectric Mie resonators composed of silicon (Si) pillars, thus encoding a parabolic phase profile.5
Most work on metasurfaces thus far has focused on static devices where the optical functionality is determined during fabrication. Dynamic metasurfaces that perform high-speed, large-field-of-view beam steering, for example, have been widely sought, but present several challenges.6 To obtain a large steering field of view and prevent diffraction-grating lobes, the metasurface elements must be less than half the operating wavelength in pitch. At the same time, each metasurface element must approach a 2π phase shift to enable large phase gradients, as needed in beam steering. Even with unity refractive-index contrast, the requirements of large phase shift and subwavelength elements are contradictory. The solution as commonly implemented in metasurfaces is to use resonant elements, where light makes multiple passes through each element, accumulating phase shift proportional to the quality factor of the resonator. The figure of merit for a dynamic metasurface is therefore:
QΔn ~ 1
where Q is the quality factor of the metasurface resonator and Δn is the refractive-index modulation necessary in the resonator. The challenge is thus to create a manufacturable, electrically addressable resonator design with adequate quality factor, coupled with a material capable of large and fast refractive index modulation.
Liquid-crystal metasurfaces
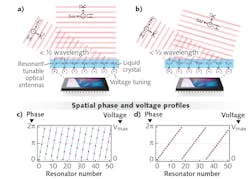
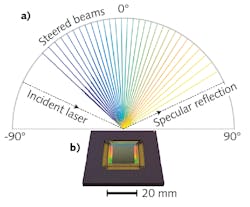
Lumotive has recently developed a reflective 1D dynamic metasurface based on liquid-crystal tuning of resonant subwavelength elements. The liquid crystal metasurfaces (LCMs) are fabricated in a CMOS foundry using conventional materials and patterning processes. The elements are resonant, enabling large local phase tuning using liquid crystals while being deeply subwavelength, thereby delivering uniform steering efficiency across a large 120° field of view with uniform efficiency across the field of view. Figure 1 depicts a conceptual illustration of the beam steering operation. Much like in a phased array, the spatial period of the phase gradient across the chip determines the steering angle, which can be derived from the first-order diffraction equation. The phase delay at each resonator is proportional to the voltage applied to that resonator, which locally rotates the liquid crystals, shifting the resonant wavelength. The LCM actively steers in one axis, while acting as a mirror in the perpendicular axis.
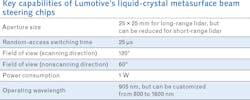
Using conventional liquid crystals, the switching speed of the LCM is about 25 μs when using conventional liquid crystals, which is dramatically faster than the millisecond-timescale switching speed typical of LCOS and liquid-crystal displays (LCDs). This switching speed is possible because of the nanoscale resonator dimensions, in contrast with the typical LCD electrode spacing of approximately 3 μm. The switching time is independent of the angles that are being steered between, which allows a lidar system using an LCM to perform arbitrary, random-access beam steering. This capability enables the lidar to zoom in and focus on objects of interest in a software-defined manner, which is not possible with mechanically scanned systems.
Furthermore, while the birefringence of liquid crystals decreases slightly with temperature, the LCM steering angles are independent of temperature. The pointing angles are determined only by the spatial period of the voltage pattern, which is in turn based on the fabricated resonator pitch and does not change with temperature.
The LCM wafers are fabricated in a conventional 0.13 μm CMOS semiconductor foundry with few process modifications. The liquid crystals are applied to the surface of the chips and sealed with a cover glass during packaging in the same manner as in LCOS display assembly. Standard LCD drivers are then attached to the LCM chips, which provide the voltages to drive the resonators. From wafer fabrication to assembly, mature commercial technologies are used, speeding up time to market for the LCM technology.
Lidar based on LCMs
The Lumotive lidar system employs two LCMs, one each for transmit and one for receive. The large aperture on transmit allows more optical power to be transmitted at the eye-safe power density, which has been a limitation of systems operating at 905 nm. Meanwhile, the large receive aperture collects more return signal compared to small-aperture mechanical and solid-state systems. By scanning on both transmit and receive, a large fraction of solar radiation can be rejected, improving system range, which is in contrast to systems that scan only on transmit and use wide field of view receivers.
In summary, LCM beam steering chips exhibit a unique combination of performance (as characterized by aperture size, switching speed, and field of view), and commercial viability (as characterized by low-cost, mature semiconductor manufacturing in a truly solid-state device). These are long-sought features in a beam-steering technology and will enable lidar with simultaneously high performance and commercial viability.
REFERENCES
1. C. V. Poulton et al., OSA Technical Digest (online), STh1M.1 (2017); https://doi.org/10.1364/cleo_si.2017.sth1m.1.
2. S. R. Davis et al., Proc. SPIE, 7618, 76180E (2010); doi:10.1117/12.851788.
3. P. F. McManamon, Proc. IEEE, 97, 6, 1078–1096 (Jun. 2009).
4. S. Chang et al., Annu. Rev. Mater. Res., 48, 279–302 (2018).
5. A. Arbabi et al., Nat. Commun., 6, 7069 (2015).
6. A. M. Shaltout et al., Science, 364, 6441, eaat3100 (May 17, 2019).
About the Author
Gleb Akselrod
Gleb Akselrod is the founder and CTO of Lumotive (Seattle, WA).