Piezoelectric actuators move precisely and powerfully
BJORN ANDERSEN
After several decades of research and development, piezoelectric actuators have evolved from their infancy stage in laboratories to use in mass-production industrial applications. Piezoelectric devices have several advantages over traditional motion-control devices, and also present design challenges for engineers trying to take advantage of this technology. Piezoelectric actuators can give the same performance from a smaller component, produce higher-resolution movement, and require a lower operating voltage than other types of micropositioning technologies. In applying this technology, engineers must design motion-feedback mechanisms so that voltage can be regulated to create the exact movement required.
The rise of co-fired multilayer technology
Certain crystals (for example, quartz) develop an electric charge (and in the case of a closed circuit, a current) when exposed to mechanical stress. This effect is known as the direct piezoelectric effect. Conversely, the application of an electric field to a piezoelectric crystal leads to a physical deformation of the crystal. This effect is known as the indirect piezoelectric effect. The deformation is proportional to the applied electric field; it is this change in shape that is useful when producing small motions required for both micro- and nanopositioning devices.
Although the piezoelectric effect is small in naturally occurring crystals, current materials technology has produced a range of ceramics that can deliver linear extensions of up to 0.15%—for example, on the order of 150 µm for a device 100 mm long. The most common form of piezoceramic used today is based on lead zirconate titanate (PZT). This ceramic material must be polarized to exhibit piezoelectric properties—this involves heating the crystal to a temperature beyond which the electric dipoles are randomly arranged while being subjected to an electric field. During this process, the electric dipoles align and respond collectively to subsequent smaller field changes.
For many years, piezoelectric actuators have been manufactured by stacking a large number of very thin (0.2-mm) piezoelectric discs, with copper shims in between each disc to act as ground and positive electrodes to opposite sides of the actuator stack. External connectors enabling the activation of all the actuator elements are then used to connect all of the ground and positive electrodes. However, this approach has several disadvantages—principally, high operating voltages (in the 500- to 1000-V range) and large size—although it provides good piezoelectric-actuator properties.
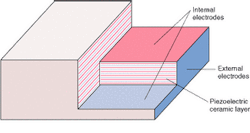
More-efficient ways of making actuator components smaller and more able to comply with modern standards have since been developed, with co-fired multilayer ceramic technology the preferred method (see Fig. 1). This multilayer technology offers the major advantage of flexibility of component design (enabling much thinner ceramic layers, a customized internal electrode structure, and processing of a variety of forms and shapes). Ceramic layers that are up to 10 times thinner mean that the operating voltage needed to obtain the equivalent electric-field strength and strain in the actuator can be reduced by a factor of 10. State-of-the-art ceramic layer thickness is as small as 10 µm, giving options to design components of various operating voltages. Commercial advantages of this technology include higher product uniformity, which opens up the possibility for high-volume and low-cost manufacture. Multilayer-based components also enable a wide range of shapes to be produced and can provide the flexibility needed to design high-precision components that match application critical features exactly.
Comparing technologies
Many different actuator technologies are used for linear motion. Most current applications are based on piezoelectric, electromagnetic, electrostatic, electrostrictive, magnetostrictive, and shape-memory-alloy actuators. Each technology has its own advantages and drawbacks. Magnetostrictive actuators, for example, offer very large output forces and quick dynamic responses, but are capable of achieving only small strains. Linear electromagnetic motors are often too large in size. Voice-coil actuators have no mechanical hysteresis, force or torque ripple, or backlash, but they can generate considerable heat. Electrostrictive actuators achieve strain on the same order as the strain of piezoelectric actuators and have lower hysteresis and creep, but their strain sensitivity is much higher. Shape-memory-alloy actuators have large strain compared to piezoelectric actuators, but have a slow response speed. Piezoelectric actuators are deemed good candidates for applications that require fine precision, low overall volume and mass, fast time response, low power consumption, and low electromagnetic interferences.
Piezoelectric ceramic materials have been used for many years in devices such as sensors, accelerometers, sonars, and transducers. Today, piezoelectric actuators are widely used in the semiconductor and microelectronics industries, biology, optics, photonics, telecommunications, and metrology (see Fig. 2). Typical applications range from gene manipulation, vibration cancellation, fiberoptic alignment, machine-tool alignment, and active damping, to hydraulic servo valves, shock-wave generation, image stabilization, and wafer-mask alignment.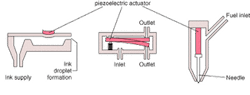
Future application areas include the use of piezoelectric actuators in the implementation of smart-structure technology. Linear PZT motors with millimeters of high-resolution travel and rotary PZT motors with an outside diameter of just 3 mm are already available; developments such as these will have an impact in a wide range of industries, from medical products to precision-tooling machines.
Atomic-level process
Although the expansion of a piezoelectric actuator is very small, it can be controlled to an extremely fine degree, with resolution limited only by the inherent noise and stability of the driver providing the voltage. The motion produced is smooth and continuous because the expansion is a process at the atomic level, and therefore there is no friction or stiction, so that piezoelectric actuators exhibit no wear and tear. The force generated by an expanding piezoelectric actuator can be very large—up to several hundreds of newtons. Piezoelectric actuators respond to an applied voltage with microsecond to millisecond time constants and can therefore produce oscillating motion at high input frequencies. Some PZT designs can provide dynamic operation at frequencies above 70 kHz.
Piezoelectric components can be made very small in size. For instance, an actuator measuring 2 × 2 × 2 mm in size with a mass of 0.06 g can provide a stroke of 2.5 µm at 60 V, delivering a force of up to 200 N. With multilayer technology, piezoelectric components can be designed to work with various voltages of 15 V or greater. Several designs, such as stacked actuators, benders, and mechanically amplified actuators, span a wide range of performances in terms of stroke and developed forces (see Fig. 3). Piezoelectric actuators typically dissipate milliwatt levels of power when moving and microwatt levels when static.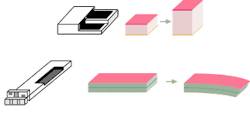
Piezoelectric actuators use ceramic elements that do not need lubricants and exhibit no wear or abrasion, making them clean-room compatible and well suited for ultrahigh-vacuum applications. The piezoelectric effect is based on electric fields and functions down to a temperature of 0 K, though with reduced performance at the lowest temperatures. Because piezoelectric actuators do not produce magnetic fields and are not affected by them, they work well for applications in which magnetic fields cannot be tolerated.
Design challenges
Piezoelectric actuators present several key design challenges. The displacement of a PZT device may not be ideal, producing some hysteresis, drift (unwanted change of displacement over time), and thermal variations. For some applications, this is not a problem, but where accuracy and drift-free operation are required, a position feedback system must be implemented to eliminate drift and hysteresis. Several methods based on strain-gauge, inductive, or capacitive sensors can be used to provide feedback information.
Like all ceramics, piezoelectric ceramics are brittle; care must be taken during use to prevent breakage. High pulling or shear forces must be avoided. This is usually achieved through the design of the actuator and the associated mechanical system. Integrating a spring preload into a PZT mechanism that applies a compressive force to the ceramic material is a common technique to overcome this drawback.
In dynamic applications, many factors must be considered before the correct selection of a PZT device can be made. Indeed, at high frequencies, much power is dissipated as heat into a PZT actuator. Therefore, it is important to ensure that the temperature rise is kept to below the maximum operating temperature of the actuator.
Bjorn Andersen is president of Noliac A/S, Hejreskovvej 18, DK-3490 Kvistgaard, Denmark; e-mail: [email protected].