CHARGE-COUPLED DEVICES: CCD advances improve TDI imaging techniques
JOHN GILMORE AND YAKOV BULAYEV
While charge-coupled-device (CCD) sensors remain the imagers of choice for traditional imaging applications such as high-fidelity image capture and spectroscopy, time-delay-and-integration (TDI) technology has changed the way we image moving objects. The TDI method is based on the concept of accumulation of multiple exposures of the same object. The primary advantage of this method is greatly increased integration time, which allows the collection of more photons.
Since the mid-1970s, many papers have documented development of TDI-CCD imagers for applications in military reconnaissance and satellite imaging. Performance of those early systems was limited by the insufficient size and low resolution of the imagers. Recently, there has been a wave of renewed interest in the use of TDI technology for semiconductor inspection, document scanning, biomedical, astronomical, and other industrial and scientific applications.
CCD image sensors
A CCD image sensor consists of an array of photosensitive charge-coupled elements (pixels). The output signal of the sensor is proportional to the electrical charge accumulated by each pixel in response to its irradiance.
Charge transport in a charge-coupled imager is controlled by multiphase (usually from two to four) signals, which induce potential wells under the electrodes and control motion of the electron packages residing in the potential wells. Charge transport includes transferring charge packets in the columnar direction, as well as clocking off the charge through the horizontal (readout) register to the charge-measurement circuit and output amplifier. This procedure causes charge packets to exit the array of pixels one row at a time.
The effective readout rate of a CCD sensor can be improved by a multiport (or multitap) architecture. However, this architecture requires that the output circuits used for each tap have well-matched characteristics; otherwise, the part of the image serviced by one amplifier may have a contrast different from the remaining image serviced by other amplifiers.
Among known architectural configurations of CCD imagers, three of the most popular are called full frame, frame transfer, and interline. The full-frame architecture, which provides a 100% fill factor, is the most universal CCD architecture used for traditional scientific and industrial applications, as well as for TDI applications.
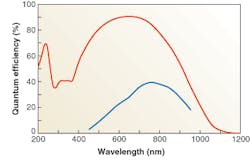
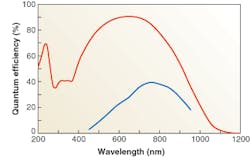
Quantum efficiency (QE) is a measure of how well a specific sensor responds to different wavelengths of light. The higher the QE, the more sensitive a CCD will be at a particular wavelength. Spectral response is a CCD characteristic that represents the relation between QE and wavelength. Depending on a required spectral response, CCD sensors can be designed for front or back illumination.
In front-illuminated CCDs, light must pass through the polysilicon gate structure located above the photosensitive silicon layer called the “depletion layer.” However, variations in the indices of refraction between the polysilicon and the silicon cause shorter-wavelength light to reflect off the CCD surface. This effect combined with intense ultraviolet (UV) light absorption in polysilicon leads to diminished QE for those wavelengths in the front-illuminated detectors.
To improve the overall QE and enable increased CCD sensitivity at UV and deep-UV (DUV) wavelengths, back-thinned technology can be used.1 In back-thinned devices, also known as back-illuminated CCDs, the incident photon flux does not have to penetrate the polysilicon gates and is absorbed directly into the silicon pixels. As the semiconductor industry moves toward smaller design rules, applications for these wavelengths are also gaining greater importance, and the spectral response characteristics of back-thinned versus front-illuminated CCD devices become critical (see Fig. 1).
TDI concepts and requirements
Time-delay-and-integration CCD technology is used for applications with relatively fast movement between the camera and the object being captured. Because integration time increases proportionally with the number of TDI stages, TDI technology is also used for detection with low-light levels where increased integration time is required.
In traditional CCD applications, the charge is accumulated in the charge-coupled elements during the exposure (integration) period. Then, during the readout period, the charge is clocked off the pixels. A signal charge is transferred from one potential well to another toward the output amplifier as a packet, without getting mixed with charges accumulated in other potential wells. In the TDI mode, the image on the CCD detector is collected and read out continuously, one row of pixels at a time (see Fig. 2). As a row is read out, the charges in the remaining rows are shifted down by one row, causing the latent image to translate down the detector.

Consider time point t1 at which the image of line L of the object to be imaged is focused on the first row of the CCD pixels. Charge q1 corresponding to the light intensity of line L is collected in the first row of pixels during the scanning of this line. At time point t2, the image of line L will be captured by the second row of pixels, thus generating in this row charge q2 corresponding to the light intensity of L. This newly generated charge is integrated with charge q1 collected at time t1 and shifted from the first row of pixels. The integrated charge is equal to q1 + q2. At the same time, the image of the next line of the object (not shown) will be focused on the first row of CCD pixels.
The image intensity of line L increases as newly generated charges are added to existing charges. This operation will continue until the TDI scanning sequence is complete, and the integrated charge that represents line L is clocked off to the horizontal readout register. Then this integrated signal is quickly-within the scan time of one line-shifted off to the output amplifier.
Suppose the speed of the moving object is V (m/s) and the pixel size is d (μm). Then the vertical shift (scan) frequency is f = V/d (MHz). If the scan rate of the detector is matched with the velocity of the moving object being imaged, the image will not blur.
For the M-stage TDI-CCD imager, where M is the number of CCD rows, the TDI integration time will be M times longer than the exposure time of one line. Therefore, the signal charge collected for the duration of the vertical shift will also increase by factor M. Accordingly, shot noise will increase by the square root of M, resulting in a theoretical signal-to-noise ratio improvement of the square root of M as well.2
The practical limit on the number of TDI stages is determined by the accuracy of synchronization between the vertical-shift frequency and the velocity of the moving object (see Fig. 3). It has been reported that a 2% to 4% scan-velocity mismatch is acceptable for 96-stage TDI devices used for semiconductor inspection.

As the speed increases and available light decreases, the design requirements such as imager size, pixel size, spectral response, number of TDI stages, pixel rate, and readout noise become increasingly important. A new generation of TDI-CCD sensors recently developed by Hamamatsu addresses most of these design needs (see Fig. 4). These sensors as well as the Hamamatsu camera-level TDI-CCD products-which include an A/D converter with selectable 12-bit/8-bit resolution and provide TDI scan rate up to 50 KHz-are useful for high-speed bidirectional scanning operations where high sensitivity and low noise are desired.

null
TDI-CCD applications
The more-effective integration time provided by TDI-CCD sensors makes them suitable for numerous applications in science and technology.
In the semiconductor industry, manufacturers require wafer-auditing systems that can measure results of the layering, patterning, and doping processes for each layer. Time-delay-and-integration devices with gigapixel-per-second data rates have been used for wafer and reticle inspections in the semiconductor industry in which UV and DUV instruments are mandated by the defect detection requirements in deep-submicron microelectronics technologies.3 TDI-based instruments also enable the implementation of advanced mask inspection and metrology where the 2001 defect detection requirement of 104 nm has been projected to reach 56 nm in 2006 and 52 nm in 2007.4
In biomedical research, TDI-CCD devices have fared well when used for fluorescence detection in capillary-zone electrophoresis and other types of biomedical experimentation.5 Thanks to a unique TDI scanning technology, the NanoZoomer Pathology System from Hamamatsu can accept up to 210 standard microscope slides at once.6 A spatial resolution better than 0.5 µm per pixel for this high-resolution virtual microscopy system has made it a powerful instrument for clinical telepathology and drug discovery.
In particular, TDI imaging-in-flow cell analysis allows electronic panning of the camera to track the cells in the flow stream.7 As the cells move down the field of view, the photoelectrons are shifted down the CCD imager. This process is synchronized by measuring the velocity of the cells and constantly adjusting the shift rate of electrons to match. Since light from each cell is collected for about 10 ms rather than just a few microseconds, TDI helps create adequate cell images without substantial blurring.
REFERENCES
1. M. Muramatsu et al., Proc. SPIE 3019, 2 (April 1997).
2. G. C. Holst, CCD Arrays, Cameras, and Displays, SPIE Optical Engineering Press (1998).
3. C. Holton, Vision Systems Design (March 2004).
4. N. Yoshioka and T. Terasawa, 2003 Int’l. Conf. on Characterization and Metrology for ULSI Tech. (March 2003).
5. J. V. Sweedler et al., Analytical Chemistry 63, 5 (March 1991).
6. NanoZoomer Digital Pathology System C9600, sales.hamamatsu.com/assets/pdf/hpspdf/NDP.pdf (2006).
7. Time Delay Integration: Enabling High Sensitivity Detection for Imaging-in-Flow on the ImageStreem 100 Cell Analysis System, Amnis Corp. (2004).
JOHN GILMORE is image-sensor manager and YAKOV BULAYEV is technical marketing specialist for image sensors at Hamamatsu, 360 Foothill Rd., Bridgewater, NJ 08807-0910; e-mail: [email protected], [email protected]; usa.hamamatsu.com.